【直線・平面・円】ベクトル方程式と図形の表現について



1. ベクトルと直線の表現
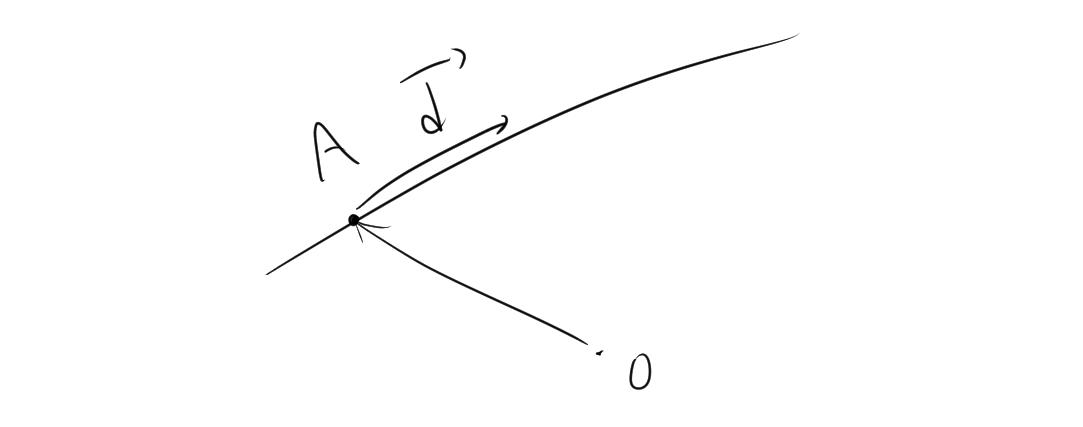
1.1. 直線のベクトル方程式
\[ \vec{r} = \vec{a} + t\vec{d} \]
- \(\vec{a}\):直線上の既知の点の位置ベクトル
- \(\vec{d}\):直線の方向を示すベクトル
- \(t\):実数のパラメータ
1.2. 直線の例
点 \(A(1, 2)\) を通り、方向ベクトル \(\vec{d} = (3, 4)\) に沿う直線のベクトル方程式は
\[\begin{align*} \vec{r} &= (1, 2) + t(3, 4) \\ &= (3t+1,4t+2) \end{align*}\]
$\vec {r} =(x,y)$とすると、 $x=3t+1,y=4t+1$となる。ここから直線の方程式を求めることを考えます。$t=\dfrac{x-1}{3}$、$t=\dfrac{y-1}{4}$となるので、tを消去すると、
\[ \begin{align*} \dfrac{x-1}{3} &= \dfrac{y-1}{4} \\ 4(x – 1) &= 3(y – 1) \\ 4x – 4 &= 3y – 3 \\ 4x – 3y – 1 &= 0 \end{align*} \]
このように直線の方程式を求めることができます。
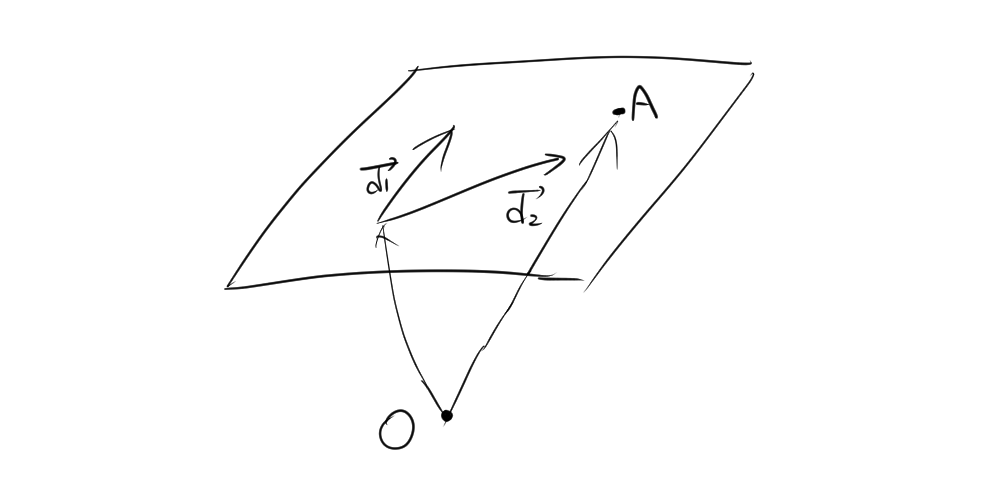
2. ベクトルによる平面の表現
\[ \vec{r} = \vec{a} + s\vec{d_1} + t\vec{d_2} \]
- \(\vec{a}\):平面上の既知の点の位置ベクトル
- \(\vec{d_1}, \vec{d_2}\):平面上の独立な方向ベクトル
- \(s, t\):実数のパラメータ
2.1. 平面の例
点 \(A(1, 2,3)\) を通り、方向ベクトル \(\vec{d_1} = (4, 5,1)\) 、\(\vec{d_2} = (6, 7,1)\) に沿う直線のベクトル方程式は
\[\begin{align*} \vec{r} &= (1, 2,3) + t(3, 4,1)+s(6,7,1) \\ &=(1+3t+6s,2+4t+7s,3+t+s) \end{align*}\]
したがって、
$$x=1+3t+6s,\quad y=2+4t+7s,\quad z=3+s+t$$
となる。このように、パラーメータtで平面を表すことができました(媒介変数表示)。ここから、平面の方程式を導出してみましょう。
まず、\(z = 3 + t + s\) の式から、\(t\) を \(t = z – 3 – s\) と解きます。これを \(x\) および \(y\) の式に代入します。\(x\) の式に代入して、
\[ \begin{align*}x &= 1 + 3(z – 3 – s) + 6s \\ &= 1 + 3z – 9 – 3s + 6s \\ &= 3z – 8 + 3s \end{align*} \]
同様に、\(y\) の式に\(t = z – 3 – s\) を代入して、
\[ \begin{align*} y &= 2 + 4(z – 3 – s) + 7s \\ &= 2 + 4z – 12 – 4s + 7s \\ &= 4z – 10 + 3s \end{align*} \]
これで、\(x\) と \(y\) の式が次のようになりました。
\[ x = 3z – 8 + 3s,\quad y = 4z – 10 + 3s \]
これらの式から、\(s\) を消去すると、次のような関係が得られます。
\[ x – 3z + 8 = y – 4z + 10 \]
これを整理すると、
\[ x – y + z = 2 \]
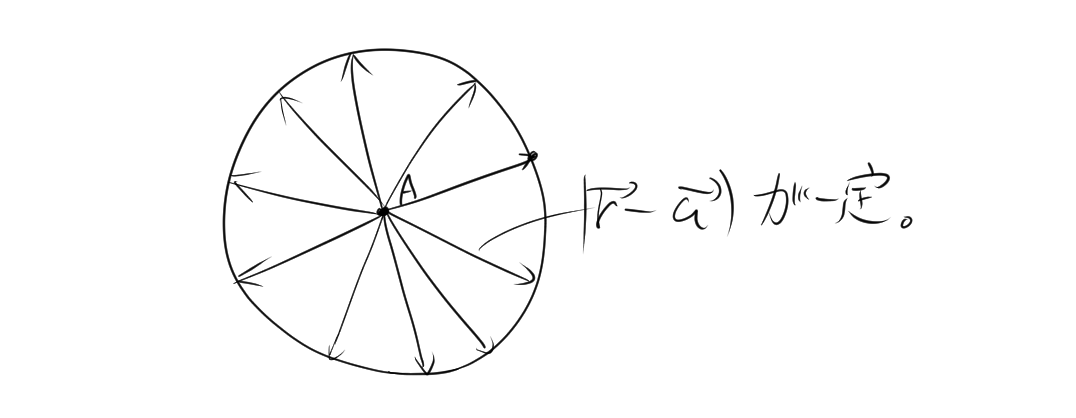
3. ベクトルによる円の表現
3.1. 円のベクトル方程式
円の中心の位置ベクトル \(\vec{a}\)、半径が \(r\) の円上の任意の点の位置ベクトル \(\vec{r}\) は、次の関係を満たします。
\[ |\vec{r} – \vec{a}| = r \]
3.2. 円の例
中心が \( (2, 3) \)、半径が \(5\) の円を考えます。ベクトル方程式は次のようになります。
\[ |\vec{r} – (2, 3)| = 5 \]
ベクトル方程式を利用して円の方程式を求めます。$\vec{r}=(x,y)$とすると、
\[ \begin{align*} |\vec{r} – (2, 3)|^2 &= 25 \\ |\vec{r}|^2 – 2(2x + 3y) + 13 &= 25 \end{align*} \]
$|\vec{r} |^2=x^2+y^2$とすると、
\[ \begin{align*} x^2 + y^2 – 4x – 6y + 13 &= 25 \\ (x – 2)^2 – 4 + (y – 3)^2 – 9 + 13 &= 25 \\ (x – 2)^2 + (y – 3)^2 &= 25 \end{align*} \]